Mai întâi să ne uităm la un simplu motor DC. Acesta poate fi operat cu 3 V până la 6 V și necesită maxim 1 A, motor care se găsește și în multe kituri de incepatori. Sursa de alimentare folosită aici este de 5 V, aceiași tensiune poate fi furnizată de un port USB.
Înainte și înapoi
Pentru început, să ne uităm la circuitul de mai jos. Releul K1 servește ca un comutator pentru a porni sau opri motorul. Releul este controlat de butonul S1, astfel încât curentul necesar motorului să circule doar prin releu și nu prin buton. Dioda D1 este menită să împiedice bobina releului să genereze o supratensiune atunci când butonul este deschis.
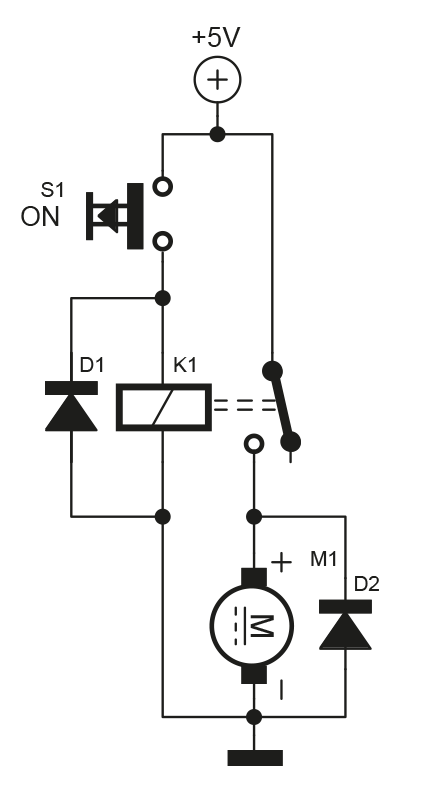
Pentru început, să ne uităm la circuitul alaturat. Releul K1 servește ca un comutator pentru a porni sau opri motorul. Releul este controlat de butonul S1, astfel încât curentul necesar motorului să circule doar prin releu și nu prin buton. Dioda D1 este menită să împiedice bobina releului să genereze o supratensiune atunci când butonul este deschis.
Dacă butonul S1 este apăsat, releul K1 pornește și motorul M1 poate porni, de asemenea. Dacă butonul S1 este eliberat, releul se opreste și motorul nu mai este alimentat. Bobinele motoarelor de curent continuu pot genera o supratensiune, la fel ca bobina din releu. D2 este folosit aici ca o diodă de blocare pentru motor și are scopul de a se asigura că nu generează un vârf de tensiune atunci când este oprit. Cu acest circuit, totuși, motorul poate funcționa numai înainte. Dacă motorul ar trebui să funcționeze și înapoi? Pentru a face acest lucru, circuitul trebuie extins pentru a include o funcționare inversă.

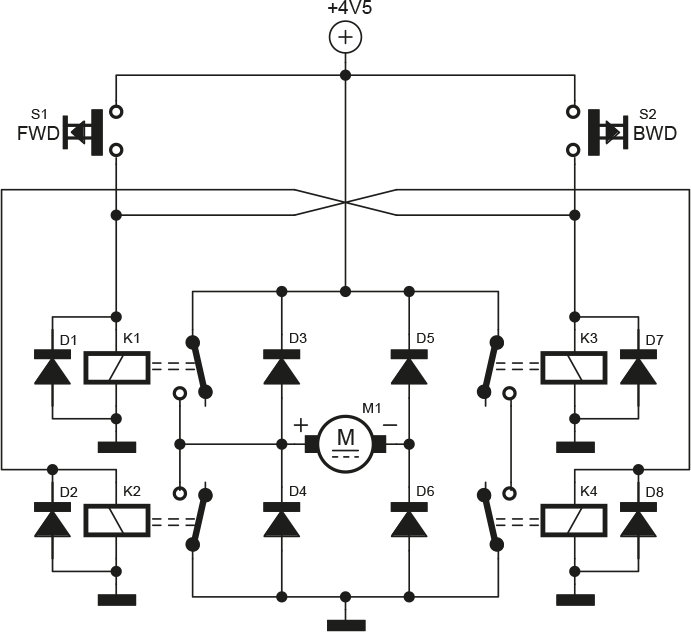
O așa-numită punte H este ideală aici, așa cum se poate vedea în schema de mai jos. Originea numelui poate fi ghicită din structura schemei. Motorul este conectat la mijlocul circuitului. Dacă butonul S1 este acționat (motor înainte), atunci releele K1 și K4 pornesc astfel încât curentul să poată circula în direcția pinului 1 la pinul 2 al motorului. Dacă motorul trebuie să funcționeze înapoi, butonul S2 poate fi apăsat și releele K3 și K2 pornesc. Curentul poate curge acum de la pinul 2 al motorului la pinul 1 al motorului și motorul funcționează în sens invers. În niciun caz nu trebuie apăsate tastele S1 și S2 în același timp! În cazul în care releele K1 și K2 sau K3 și K4 ar fi vreodată închise în același timp, curentul ar curge prin aceste relee ca un scurtcircuit și le-ar putea distruge în acest proces.
De la lent la rapid
Cu o punte H putem controla acum direcția în care se rotește motorul nostru, dar viteza nu. Comutarea releelor sub sarcină, în special cu curent continuu, le scurtează considerabil durata de viață. Pe lângă dezavantajul duratei de viață scurte cu multe cicluri de comutare, releele nu sunt nici compacte, nici eficiente din punct de vedere energetic.
Prima optimizare evidentă este utilizarea semiconductorilor. În acest caz, ne uităm la structura cu tranzistoare NPN și PNP. În schema de mai jos este reprezentată schema circuitului modificat. Releele au fost înlocuite cu tranzistoare PNP (T1 și T3) și tranzistoare NPN (T2 și T4). S-au schimbat și comutatoarele. Comutatorul S1 se asigură acum că baza lui T1 și T2 este trasă la masă cu rezistențele serie R1 și R2 când comutatorul este închis sau la tensiunea de alimentare de către R5 când este deschis. Comutatorul S2 face același lucru pentru tranzistoarele T3 și T4.
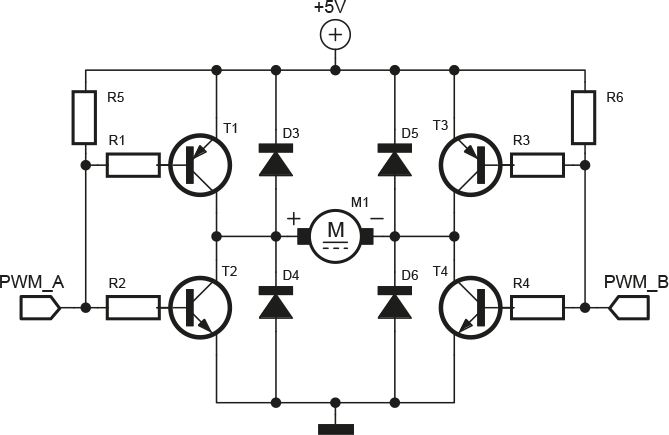
Când circuitul este în repaus, cu comutatoarele S1 și S2 deschise, tensiunea de alimentare este prezentă la rezistențele R1 la R4 prin rezistențele R5 și R6. Aceasta înseamnă că T3 și T1 au o rezistență foarte mare (în intervalul de megaohmi) și sunt blocați. T2 și T4, pe de altă parte, sunt acum in conducție datorită curentului de bază care curge și, prin urmare, au impedanță scăzută. Astfel, ambele părți ale motorului sunt conectate la masă și nu trece curent prin motor.
Ce se întâmplă când comutatorul S1 este închis și comutatorul S2 este deschis? În acest caz, potențialul de masă este prezent la rezistențele R1 și R2. Ca rezultat, nu mai curge curent prin baza tranzistorului T2, iar baza și emitorul au acum același potențial. Tranzistorul T1, pe de altă parte, intră în conducție, deoarece poate curge curent intre bază si emitor. Acest lucru dă acum unei părți a motorului o tensiune de alimentare pozitivă, în timp ce cealaltă este legată la masă, astfel motorul începe să funcționeze. Dacă butonul S1 este deschis și S2 închis, tranzistorul T3 intră în conducție și T4 este in blocare. Motorul începe să funcționeze, dar în sens invers.
Ce se întâmplă dacă viteza ar trebui acum controlată, de exemplu de un microcontroler? În loc de buton, pot fi utilizați și doi pini ai unui microcontroler, care sunt marcați ca PWM_A și PWM_B. Dacă vrem doar să mergem înainte sau înapoi, este suficient să setăm pinii high sau low. Dacă viteza trebuie controlată acum, poate fi utilizat PWM (pulse width modulation). În funcție de raportul puls-pauză, viteza poate fi aleasă și, în funcție de PWM_A sau PWM_B, poate fi determinată și direcția. Această schemă este proiectată pentru o tensiune de alimentare de 5V și, prin urmare, ieșirile MCU trebuie să poată furniza niveluri de 5V. Dacă motorul trebuie să funcționeze cu o tensiune mai mare sau MCU (cum ar fi Raspberry Pi Pico) poate tolera doar 3,3V pe pinii săi I/O, circuitul trebuie ajustat puțin.
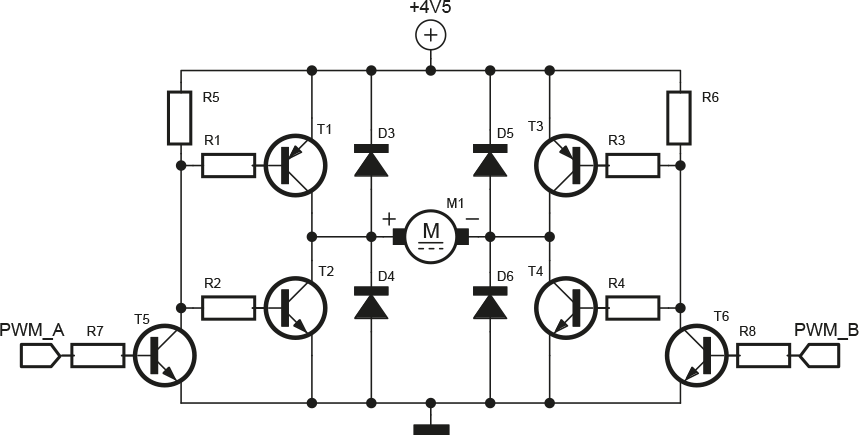
În schema de mai jos este reprezentată o schema cu încă două tranzistoare, T5 și T6, care sunt controlate de PWM cu un rezistor în bază. Datorită acestor tranzistoare, pot fi utilizate microcontrolere care funcționează cu o tensiune de alimentare mai mică decât tensiunea disponibilă pentru motorul de curent continuu. Trebuie remarcat faptul că semnalul PWM este acum inversat. Dacă se aplică o tensiune la T5 sau T6, acestea intră în conducție și astfel trag tensiunea de la intrarea tranzistoarelor T2 și T1 sau T3 și T4 la masă. Acest lucru trebuie luat în considerare la controlul de către MCU, deoarece înainte și înapoi sunt acum schimbate.
Cu toate acestea, tranzistoarele PNP și NPN au dezavantaje în această aplicație. Acestea necesită un curent de bază și, prin urmare, energie, iar frecvența PWM este, de asemenea, limitată. Deoarece schimbarea de la rezistența mare la scăzută și înapoi nu are loc într-o clipă, există pierderi de comutare. Mai mult, în momentul în care T1 și T2 sau T3 și T4 își schimbă stările, există un moment în care ambele tranzistoare ale acestor perechi sunt conductoare condiționat. Acest lucru permite un curent mai mare să circule direct de la tensiunea de alimentare la masă. Acest lucru crește, de asemenea, pierderea de putere și poate duce chiar la o defecțiune.
Un articol de ing. Vlad Ion
Sunt Vlad Ion, absolvent al Facultatii de Electronica, Telecomunicatii si Tehnologia Informatiei din cadrul Univeristatii Politehnica din Bucuresti. De mic am fost atras de domeniul electronicii si mi-a placut sa imi construiesc singur circuitele avand un mic laborator acasa. In prezent profesez ca PCB Design Engineer la o firma din Bucuresti in domeniul aerospatial.
”